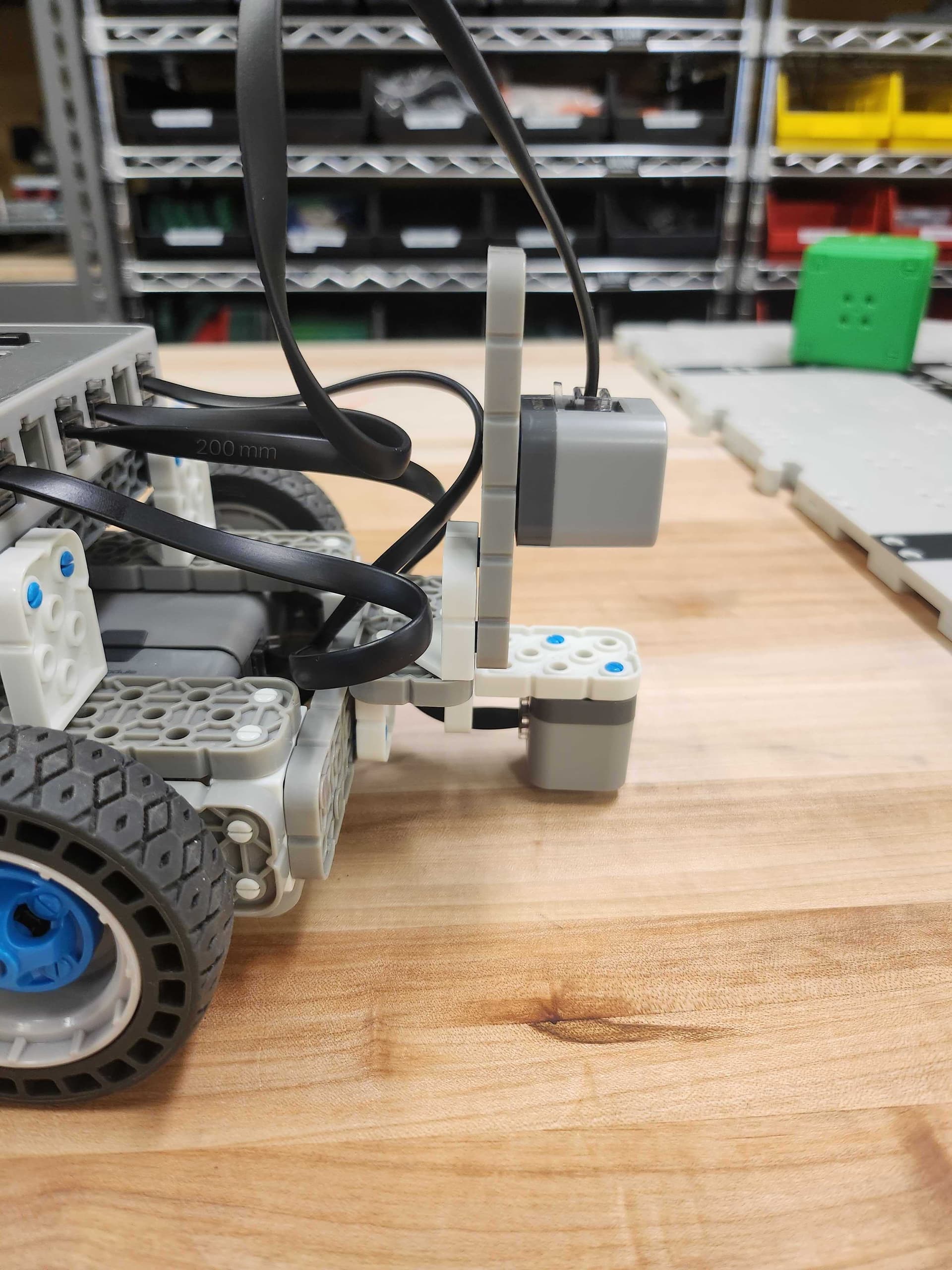
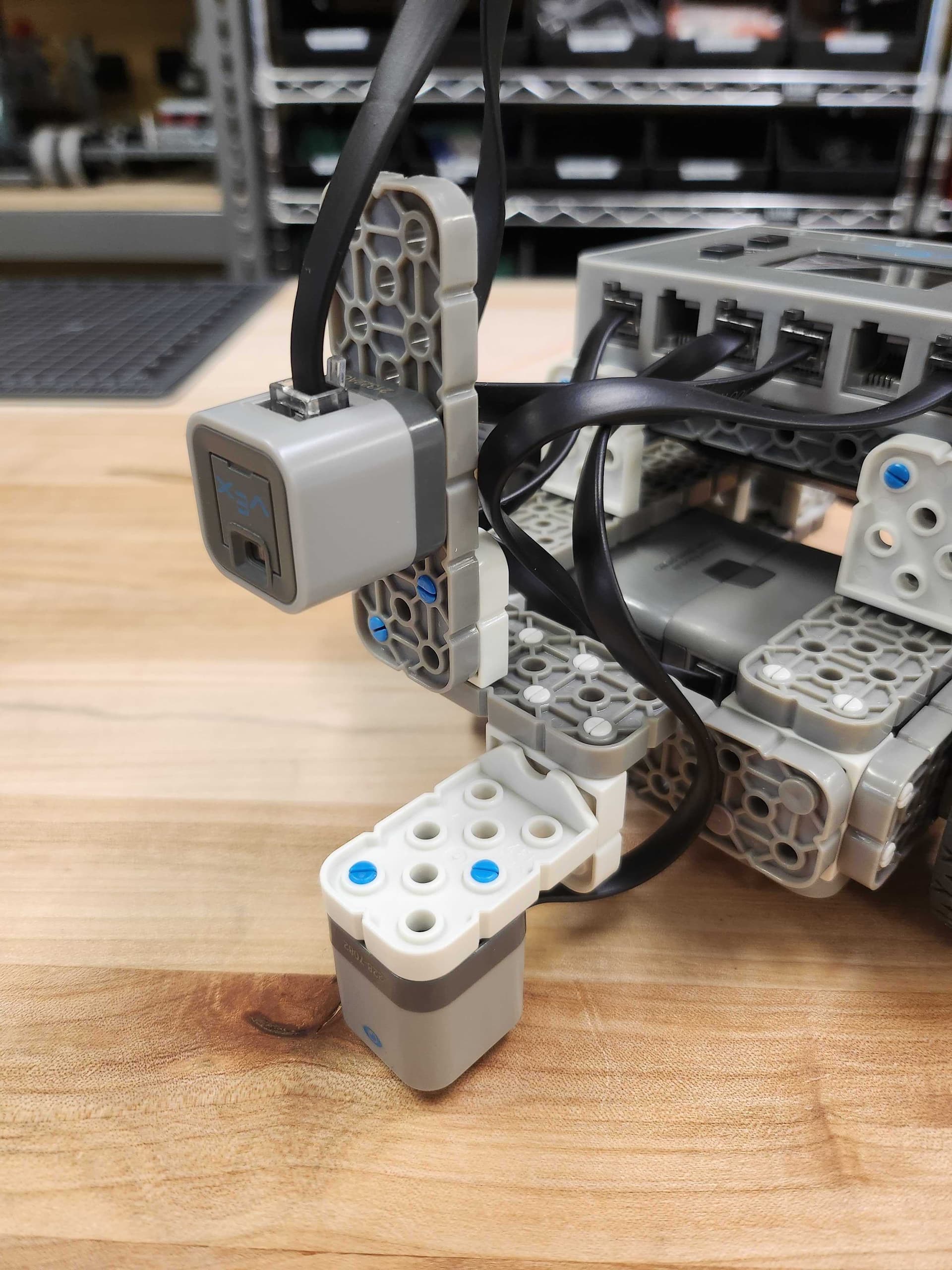
Hello @Jonathan_Haynes! Here is a second solution (from Lesson 4). This one utilizes both the Distance and Optical Sensor. As you can see here, the Distance sensor is used to distinguish when the sensor is close to a cube. The Optical sensor is facing downward to detect when the robot is close to the edge of the Field.
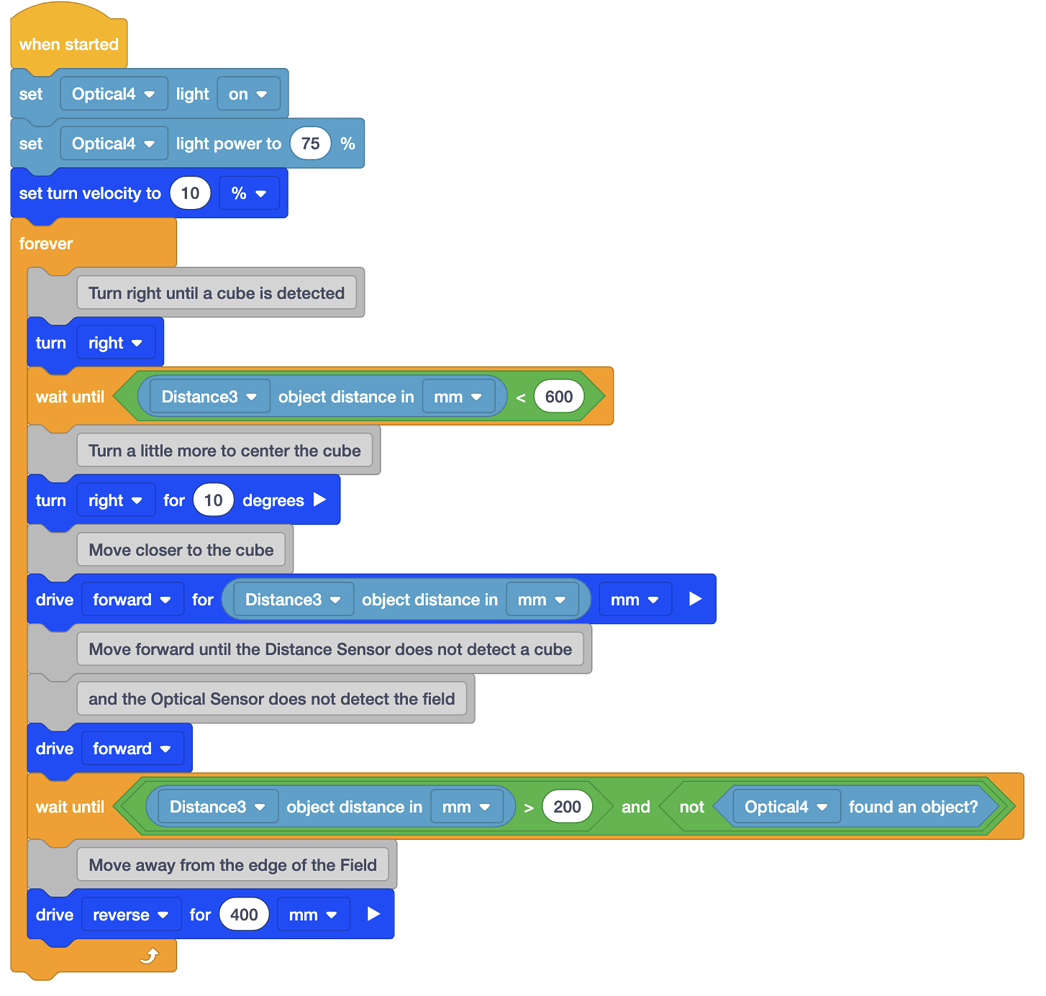
Distance and Optical.iqblocks (8.9 KB)
I’ve also included images of the build so you can see how the sensors were attached. Let me know if this information is helpful ![]()