Updated
The problem seems to be fixed if I change “Percentage” to “RPM”. Full RPM (600) won’t recreate the problem. I thought both units are controlled by PID? Still don’t quite get it but looks like RPM provides a better velocity stability.
---- original post-----
My goal is to have the robot drive to the origin (0,0) regardless of its starting position, first along the Y-axis then X-axis.
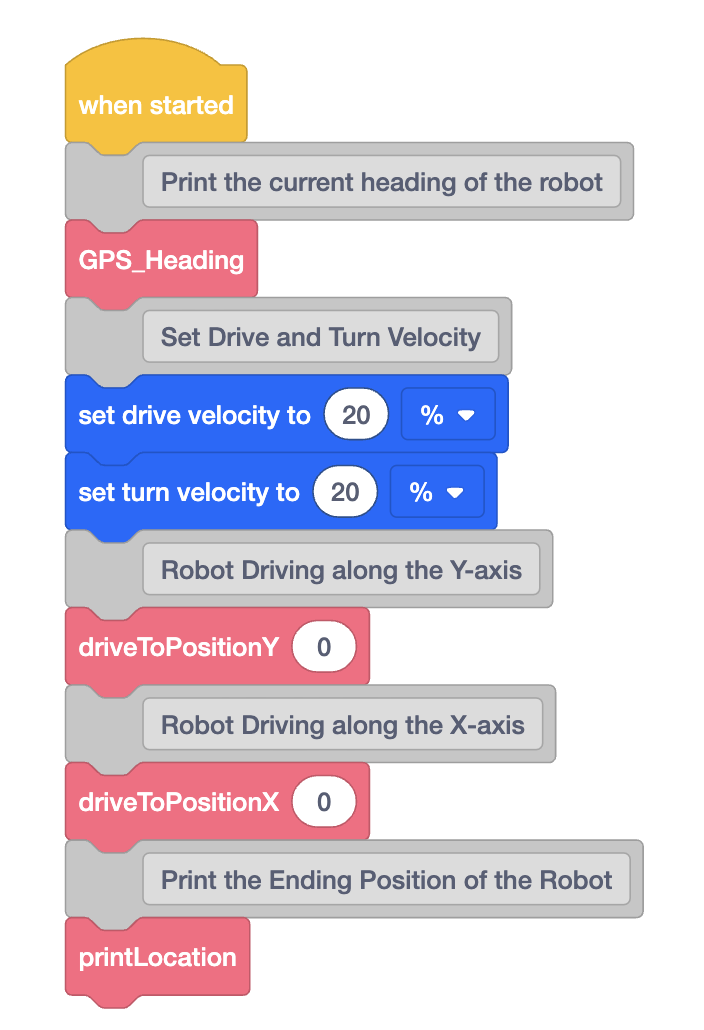
However, I came across this problem - if the drive velocity is set to 100%, the robot will just keep moving until it hits the perimeter and flies out of the field… and it works fine when the velocity is reduced to 99%…
The tolerance is set to (-10, 10) for both X and Y.

Any ideas why this happens?
