In Part 1, we explored the process of launching a disc into a specific position and discussed the utilization of Intake velocity and drivetrain heading to discharge any disc into the 4-point goal zone.
In Part 2, we will focus on how to implement the disc launch processes into the Snapshot robot to score all the discs from a certain area into the desired Goal Zone on the VIQC Virtual Skills accurately and consistently.
To ensure that all disc launch processes are consistently implemented as expected, we first need to use the Bumper Switch sensor and a flag variable in the program to coordinate the drivetrain and Intake behaviors to avoid mutual interference between two disc launch processes.
- Coordinating robot behaviors by Bumper Switch
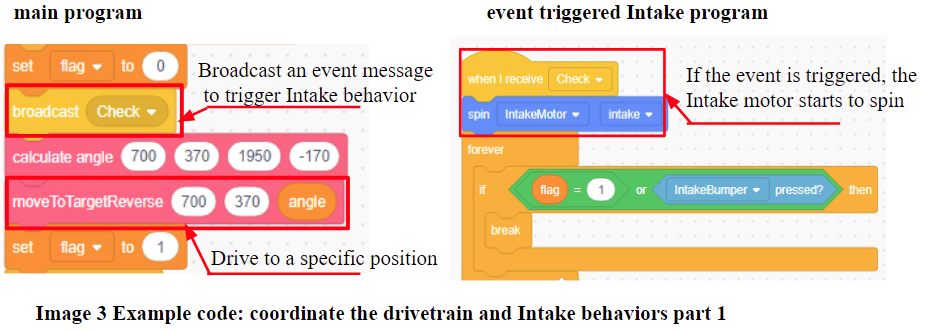
A single disc launch process involves two separate robotic behaviors: 1) Operating the drivetrain to drive the robot towards a specific position; 2) Spinning the intake motor ultimately loads or launches the disc.
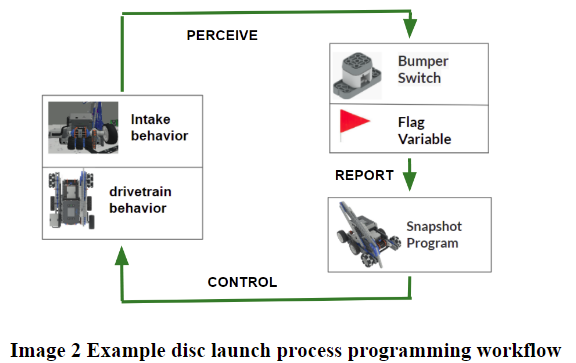
To improve the efficiency of the process, we can introduce an event to trigger the Intake motor at the beginning of the disc launching process. While the robot is moving, the intake motor will continue spinning to take in the disc, checking the Bumper Switch sensor to determine if a disc has been loaded.
The coordination workflow part 1
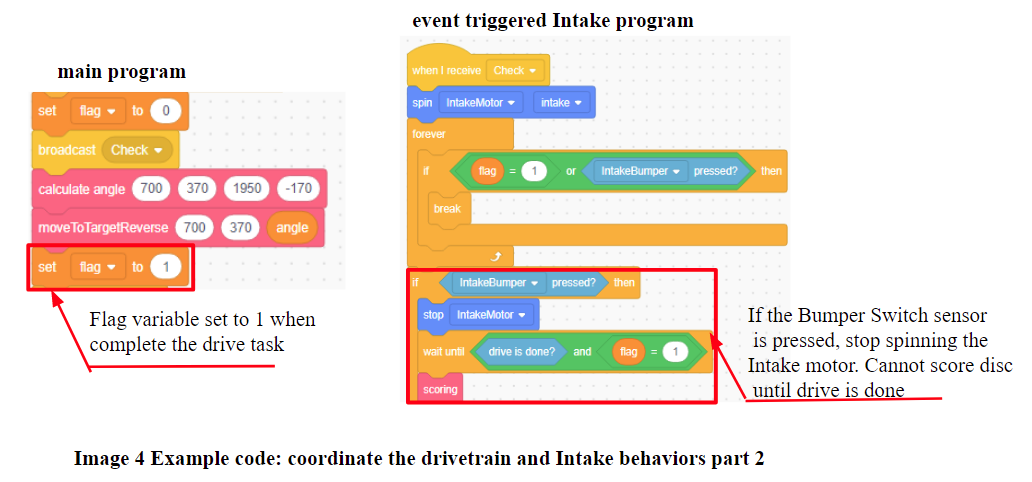
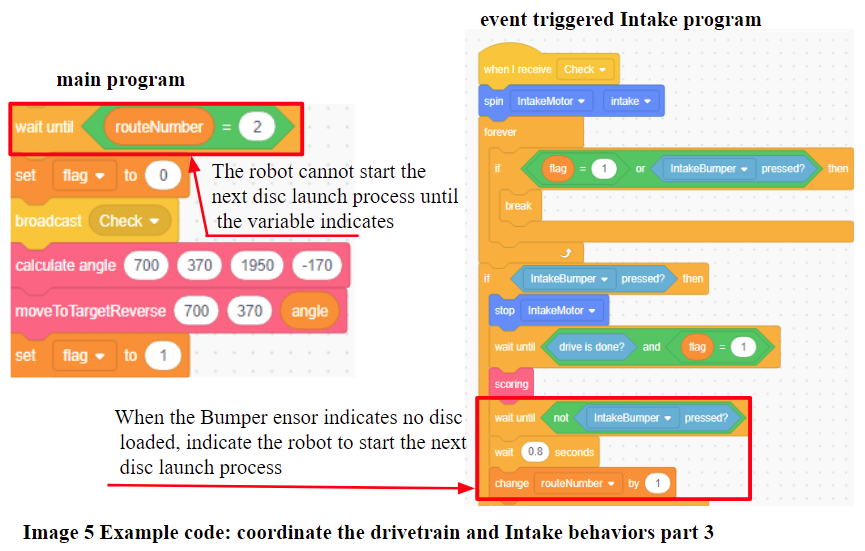
To ensure that the disc can be successfully launched to the target position, once the Bumper Switch sensor detects a disc being loaded into the Intake, the Intake motor will stop spinning immediately. Afterward, the robot cannot spin the intake motor until the flag variable indicates that the drivetrain completes the driving task.
The coordination workflow part 2
To secure that the disc is launched from the designed position in the right direction, the robot cannot move to implement the next disc launch process until the Bumper Switch sensor indicates that no disc is loaded. (all the discs loaded in the Intake have been spun out).
The coordination workflow part 3
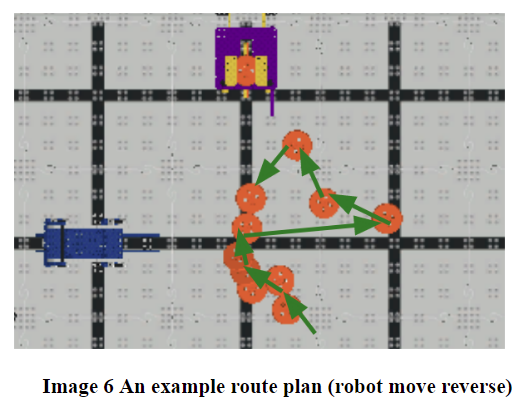
- Route plan
So how do we score the most discs possible during the limited game time? The planning of an efficient route plays a key role, as traveling distance and launch environment settings matter towards the launch implementation.
The shorter moving distance means less traveling time. Therefore, minimizing the traveling distance for the robot during its implementation is an effective way to save time.
Additionally, an effective route plan can help to avoid some unpredictable problems, such as guiding the robot to evade the discs on the field while traveling, to ensure that the position of the discs will not be changed in the environment setting and cause unexpected launch errors.
There is always more than one way to solve a problem. By practicing various innovative algorithms and optimizing the implementation process, we can continue improving the robot’s performance in the VIQC Virtual Skills game.
Do you have any questions, comments, or feedback? We are looking forward to hearing from you.