Do you enjoy racing against a clock? Do you love cracking robotic transport challenges? Then you must be excited about the new VRC Virtual Skills game – Over Under.
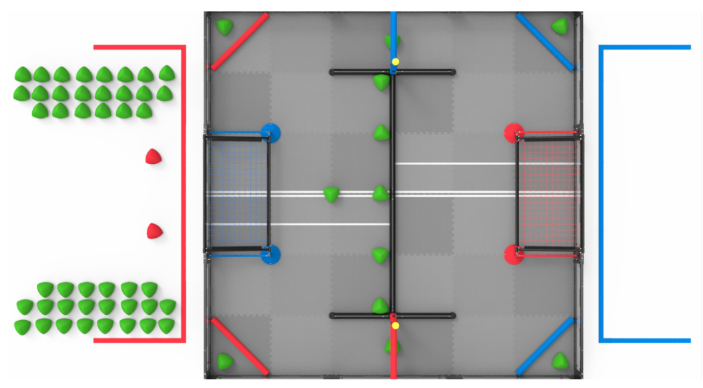
The main goal of Over Under is to score Triballs to a Goal or the Offensive Zone to win as many points as possible in one minute.
To earn points, we need to control Striker, the Hero Bot, to pick up a Triball from a point on the Field precisely and place it in the desired location. To excel at the game, we can leverage various sensors to optimize the speed and precision of each transportation to increase the number of scoring times for the robot.
So, let’s get acquainted with the robot controls and sensors involved in this task first.
The Intake and the Optical Sensor
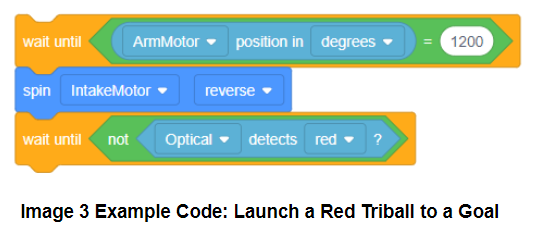
Virtual Striker uses the Intake to pick up and release Triballs. The Intake is controlled by the Intake Motor. When the Intake Motor spins forward, it collects the Triball positioned in front of the Intake Mechanism. Conversely, when the Intake Motor spins reverse, the Intake releases and launches the Triball outward.
As we know that the Triball used in the VRC game is acon-shaped and with a primary dimension of over 15 cm. Thus the robot requires a certain amount of time to complete collecting or launch a Triball. Using the Optical Sensor, we can determine the exact time when a Triball is in/leaves the Intake and accurately control the timing to execute the next instruction. In this way, we can accomplish the task successfully without wasting any time.

The Arm and the Rotation Sensor
In Virtual Skills, Striker uses the Arm to adjust the height of Intake or stow it all the way in the robot for specific tasks. The Arm is controlled by the Arm Motor. And it will be fully lowered when spun forward for 1200 degrees.

We need to raise or lower the Arm to a certain position to accomplish a specific task. Using the rotation sensor can help us track the exact position of the Arm and determine if it is in the correct position to do the corresponding task. By adopting this method, we will achieve a reliable intake of launch behavior.
The Drivetrain and the Inertial Sensor
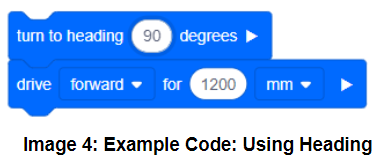
In Over Under Virtual Skills, the Drivetrain allows Striker to move around Field. To control the robot’s motion, we use the blocks in the “drivetrain” category to drive and turn the Drivetrain.
As we know that there are barriers set on the Over Under Field. The good news is that Stricker can get over the barriers. This function helps us save a lot of time when driving from one Alliance’s Offensive Zone to another.
While Stricker is designed to overcome the barriers on the Field, there is still a possibility of it falling over when driving over an obstacle in an unexpected direction. Using the drivetrain heading, the Inertial Sensor can navigate Striker to make an accurate turn in a desired orientation to avoid toppling over.
Now it is time to code the robot! Let’s try to make it pick up a Triball rapidly on the Field and launch it in a Goal as quickly as possible to win points! All we need to do is to write the corresponding instructions in the correct sequence for the robot to execute.

Tips for scoring:
- Avoid consistently launching the Triballs to a Goal or the Offensive Zone from the same position and in the same direction. As it may result in the Triball bouncing back or getting stacked on top of another Triball, leading to miss points.
- In some situations, to save time, we can earn 2 points by using the Drivetrain to push a Triball to the Offensive Zone.
Over Under is a fantastic opportunity to execute the real-life problem-solving process – overcome obstacles persevere, adapt strategies flexibly, and discover reliable and efficient solutions through practice. And more important – have fun!
We will continue to explore this game in our future posts. Please let us know if you have any questions, comments, or feedback. Thank you!