In Over Under Virtual Skills, we strive to transport Triballs and score as many points as possible in one minute. This mission can be broken down into many smaller tasks, each involving driving the robot to collect a Triball and score it in the Goal or an Offensive Zone. The less time it takes to complete each cycle, the more Triballs we are able to score, and the higher overall score we can achieve!
We noticed that there are just two scoring methods in Virtual Skills: launching a Triball into a Goal or placing a Triball into an Offensive Zone. Does that mean there is limited room for maneuver? Of course not! Before deciding on our strategies, let’s take a look at the playground and the game rules first.
In VRC Virtual Skills, there are 2 Red Alliance Triballs, 12 Green Triballs on the Field, and 44 Green Tribals on the Match Load Zone. By testing some simple programs, we can evaluate each specific task’s scoring efficiency and time-consuming level. This information is essential for us to determine our strategies. The following table is an example (please note that individual perceptions may vary).
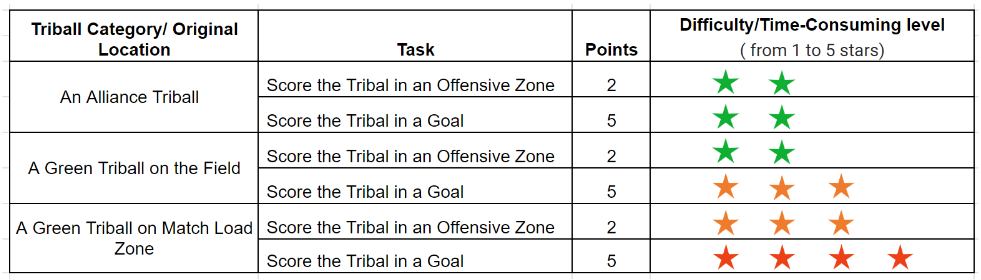
During the Match, the more Triballs we are able to score, the better! Thus we can prioritize completing tasks that are easier and less time-consuming to improve our performance.
1. Strategies for the opening of the Match
A good start is half the battle won. At the beginning of the Match, we must use the Pre-Match checklist to select the robot’s starting location (8 options), the robot’s starting direction (4 options), whether or not the robot has a preload (2 options), and the Field preload location(10 options). In other words, we have 640 possibilities to start the game!
According to the rules, scoring a Red Alliance Triball in any Goal can earn 5 points! Thus, we can strategically select an advantageous starting configuration that enables the robot to score two Red Alliance Triballs in the Goal in the shortest time possible, then promptly grab one Green Triball nearby and launch it in the Alliance’s Goal. By doing so, we can accumulate 15 points in a short time in the opening, setting the stage for enhancing the overall performance. The following GIF shows an example.
Tips to improve efficiency:
-
Navigate the robot to avoid the Triballs on the Field while traveling. This will ensure that the positions of the Triballs remain unchanged, preventing any unexpected errors during the future collection of the Triballs.
-
Test different starting configurations and the corresponding solutions. By observing the robot’s performance, we can optimize our strategies for the best possible start.
-
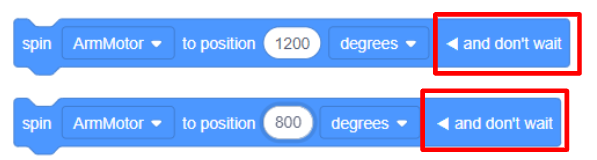
Minimize the time needed for Virtual Striker to complete the process of scoring a Triball. Enable the robot to lower or raise its Arm while in motion using the and don’t wait feature of the spin ArmMotor to position block.
2. Efficient Path Plan
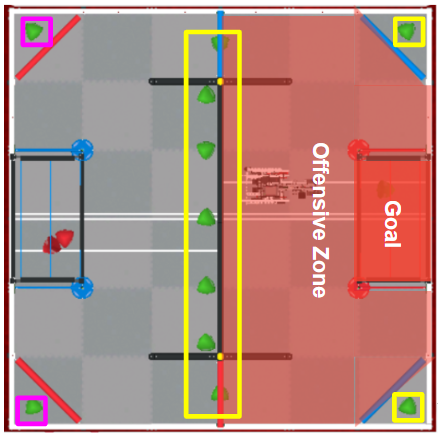
After launching the first Green Triball, the robot is located on the right half of the Field. Obviously, scoring the Green Triballs located on the Field requires less time, as they are closer to the robot, the Goal, and the Offensive Zone than the Triballs in the Match Load Zone. Therefore, we can prioritize scoring the Field Triballs, which allows us to score more Triballs during the limited Match time.
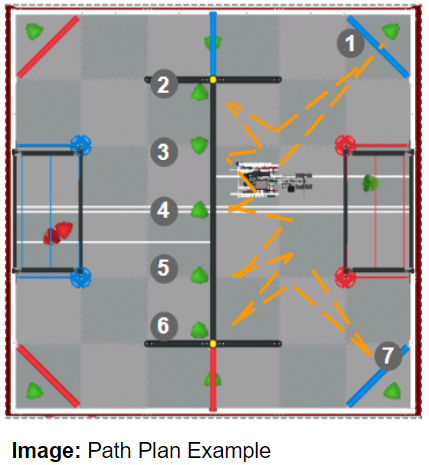
To shorten the driving distance and decrease the rotational angles, we can plan an efficient path for the robot to drive on, sequentially picking up and launching the Triballs. It will allow us to minimize travel time and maximize the number of Triballs scored into the Goal.
Tips for path planning:
- Utilizing the length of the Arm, the robot can intake Triballs adjacent to the barrier without having to cross over it. This approach significantly reduces the time required for collection.
- To determine the optimal path, we might need to test various solutions, adjust the scoring sequence of the Triballs, and fine-tune the positions of the robot for intaking and launching the Triballs. Implementing modular programming can significantly streamline and simplify this entire process.
3. Strategies for scoring Match Load Zone Triballs
Now it’s time to score the Triballs located on the Match Load Zone - let’s try to make the most of the valuable remaining Match time.
These Triballs are located in the corners of the Field and are far from the Goal, making it time-consuming for the robot to collect and launch them in the Goal. On the other hand, the Offensive Zone offers a quicker scoring option, but with a lesser value of 2 points. To make a wise choice, we can evaluate the scoring efficiency. Based on our algorithm, if the time required for the robot to score a Triball in the Goal allows us to score three or more Triballs into the Offensive Zone, we will place the Triballs into the Offensive Zone. Otherwise, we will launch the Triballs in the Goal to earn 5 points each.
Tips:
- To evaluate the scoring efficiency, use the timer and the print block to measure the time the robot requires to complete a task.

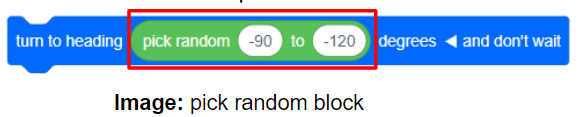
- To prevent the Triball from bouncing back or getting stacked on top of another Triball, which leads to miss points, we can use the pick random block to adjust the launch angle within a certain range to avoid consistently launching the Triballs to a Goal or the Offensive Zone from the same position and in the same direction.
- If there is not enough time remaining to score a Triball into the Goal, we can make the most of the time by scoring the Triball into the Offensive Zone.
Over Under Virtual Skills is not just a game. It is an exciting platform for us to experience the problem-solving process in the tech era.-- strategize, plan, evaluate and select the best approach, refine and optimize our solution…… But above all, enjoy the time and HAVE FUN!
Good luck! And have a wonderful season!
Please let us know if you have any questions, comments, or feedback. We are looking forward to hearing from you!