This year we are having trouble with using the turn block for accurate turns… our 90 degree turns are 62.5 degrees. We also don’t seem to have the option to turn to a heading. Are we missing an update. Our firmware is updated.
Maria
1 Like
Hi @Maria_Brinza! Thanks so much for your question ![]()
My first thought for troubleshooting a robot not turning correctly is wondering what the Robot Configuration is. Are you using 1st gen or 2nd gen VEX IQ?
Not sure what robot you have built, but if it was either the BaseBot or another pre-determined build from builds.vex.com, did you first use a template? This will ensure the Drivetrain and the Inertial Sensor is configured correctly (if using 2nd gen).

Thanks ![]()
1 Like
Hi Maria,
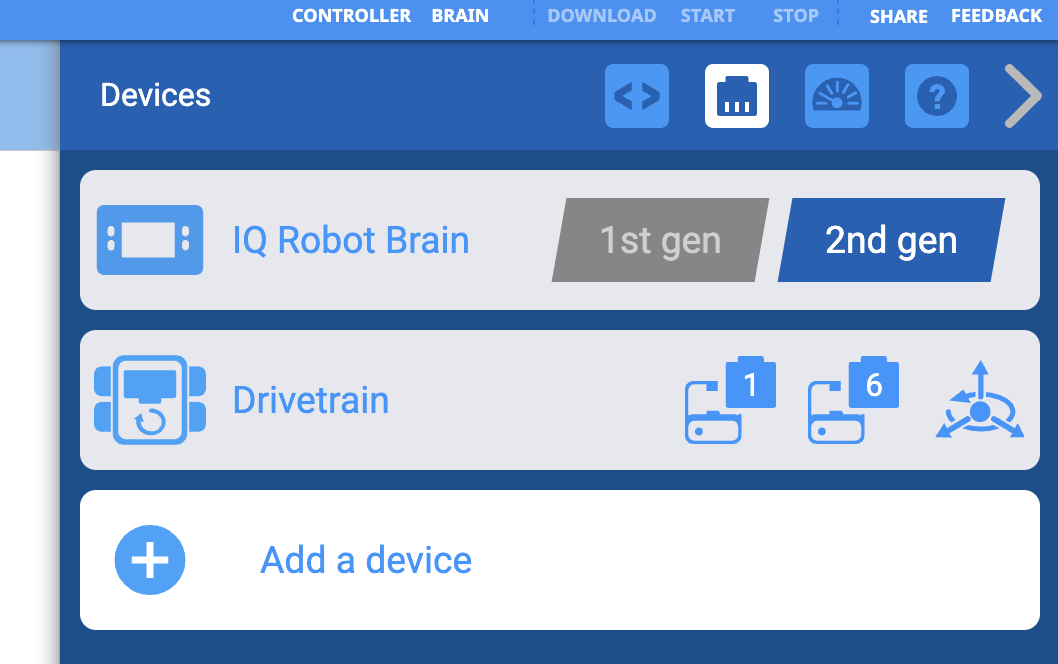
If you do not have the turn to heading block, that means it is very likely that you have not configured a gyro or inertial sensor in the drivetrain settings in VEXcode IQ’s robot configuration panel. One of these is vital for accurate turns.
If you are using 2nd Gen, you can configure the Brain’s internal Brain Inertial sensor. If you are using 1st Gen, you will need to have the Gyro Sensor mounted on your robot and configured in the Drivetrain Settings.
If you don’t have an inertial or gyro configured, VEXcode will try to mathematically calculate how far to turn the wheels based on the track (width between wheels) and wheelbase (length between wheels) and this will take some tuning to get it accurate. Even then, it will not be anywhere near as accurate as using the inertial or gyro sensor.
2 Likes
Thanks, found the issues, we did not use the example to set up our 2 motor drivetrain… all is well. Thanks for the help
2 Likes
Awesome! So glad it got figured out ![]()
1 Like
Hello everyone! I see this issue very often, where someone has a project like this for example, and the robot does not turn 90 degrees. Instead, it turns too much, or not enough, but most often too much.

As mentioned earlier in this thread, the most common reason for this is that the Inertial Sensor is not configured. However… is there an easy way to tell if the Inertial Sensor is configured or not? The answer is yes!
On the actual Brain’s screen, if the Inertial Sensor is NOT configured before a project starts, a ‘compiling’ message in red will quickly flash and then the project will immediately start. If the Inertial Sensor IS configured, the ‘compiling’ message in red will still quickly flash, but then there will be a second or two delay as a ‘Calibrating Inertial’ message in white appears. When you see this ‘Calibrating Inertial’ message, this indicates that the Inertial is configured. I filmed a video showing both to highlight the difference.
You can also see from the video that without the Inertial Sensor, the robot does not turn 90 degrees accurately. However, once the Inertial is configured, the robot turns almost a perfect 90 degrees.
I hope this helps ![]()
3 Likes
