A student created code for Rapid Relay in vr.vex.com then duplicated the code to codeiq.vex.com, but the robot goes into the turn and continues to turn in circles. We tried to eliminate code blocks, tried to tweak the brain inertial gyro, but we were not able to stop the turning in circles. Any recommendations on how to correct this coding issue?

We will take a look and get back to you.
There are two different ways you can approach to this.
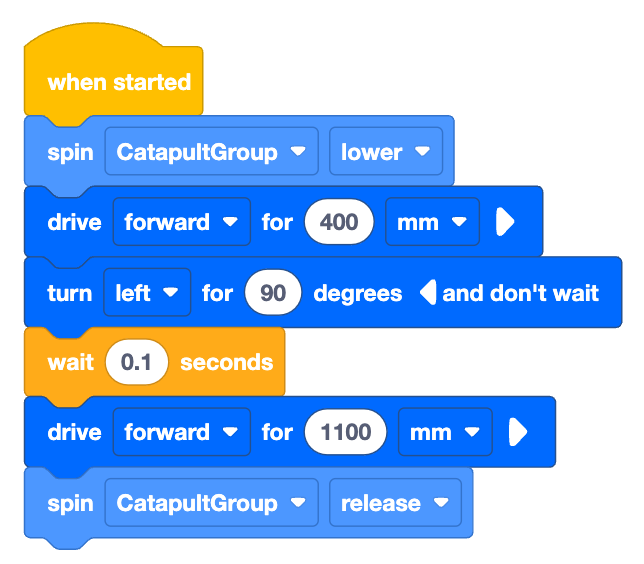
First, you could add a wait for 0.1 second command after the turn left for 90 degrees and don't wait. Then the physical robot will turn slightly and drive forward again.
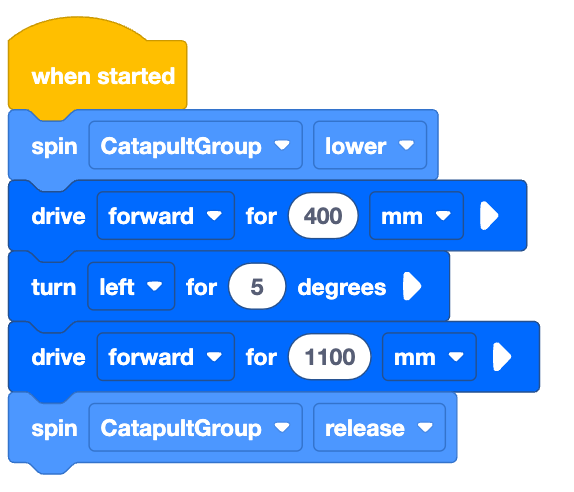
Second option, you could use a specific turn left for X degrees without the don't wait. Then it will run through the commands.
I can go on and explain more about don't wait if you are interested in learning more about it. But these two options should help you solve the issue in the physical IQ.
Hi @Jonathan_Haynes as a PD+ all-access member you can also book a 1-on-1 session right from your dashboard to meet with @Jimmy_Lin or any of our VEX Team to discuss further.