VEX AIR is well on it’s way! We’ve been spending a bunch of time in the office testing projects, examples, and building the API to help support everyone once they get their drones.
I wanted to share one of my favorite examples from the Vision blocks page. For context, the drone has two different Vision Sensors – one facing forward and one facing down. Understanding how the position of AprilTag IDs relate to the position of the sensors, especially the downward, can be tricky! This example was made to help explain and visualize the center X and center Y properties for Vision.
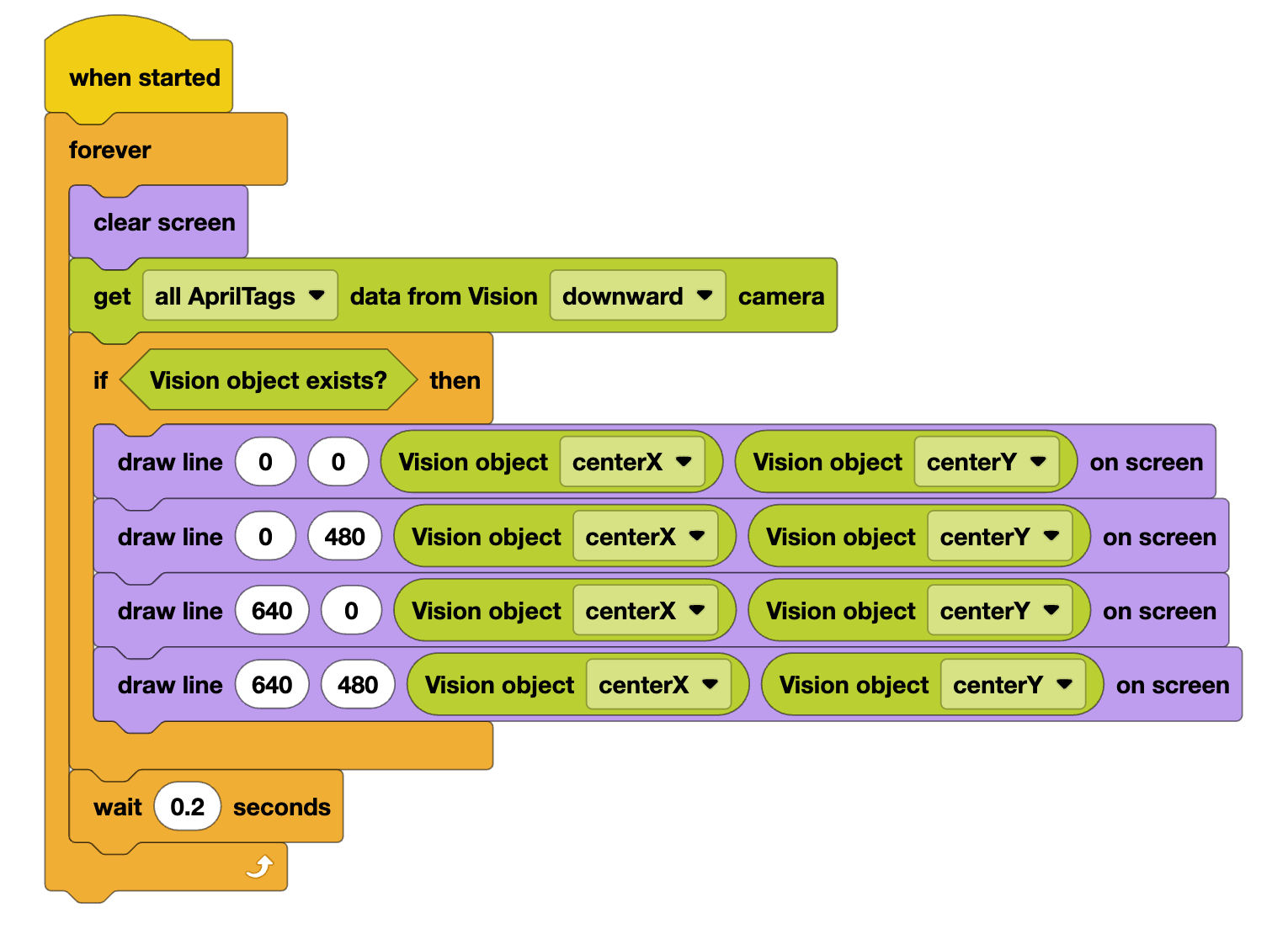
This is a great way to use screen drawing and Vision together and create your own tools pinpointing the center of the AprilTag ID. Also a cool way to think about how properties like center X and Y can be used in a project.
This is a little video showing me moving the drone about and the custom center point on the Controller screen.
Check out the other API examples! It’s all live at api.vex.com/air
