I am trying to code the vision sensor to track the Yellow Ball for the Rapid Relay Challenge. I am trying to use the link below to guide me through this process and can’t get this program to work. I would appreciate any support in terms of coding that would help my team calibrate the sensor. We tried the code suggested in the video and it isn’t tracking.
Welcome to the community!
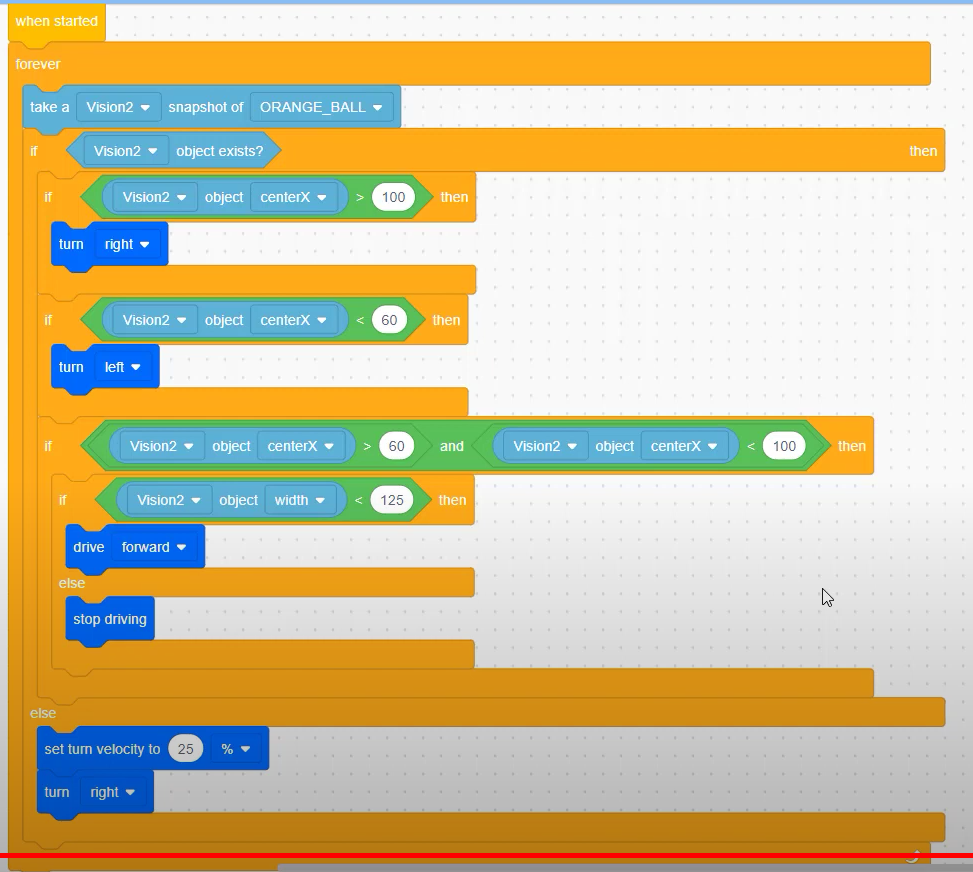
For this, the first thing I would do is check in the configuration itself. You should double check that the sensor is connected to the expected port on the brain (looks like Port 2 based on this screenshot), and using the Utility to be sure that the orange ball is being detected by the sensor with that signature. It’s important that you are doing your testing and your coding in the same area so that the lighting conditions are consistent, so that could be affecting the readings.
Secondarily, trying one chunk of code at a time can help! Using print blocks inside the loops can help you make additional connections between the actions of the robot and the code itself. i.e. if the brain prints RIGHT every time it turns right, or LEFT when it is turning left, then you can see what If statements are running at any given time.
There’s many more things we can try to work this out. Let me know how these first suggestions work for you ![]()
Hi @Michael_Russoniello just checking in to see if you are all set!
