Hi! I am creating activities for our 6th grade Math teachers using VEX IQ basebots for the following PA standard:
Determine the area of triangles and special quadrilaterals (i.e., square, rectangle, parallelogram, rhombus, and trapezoid.
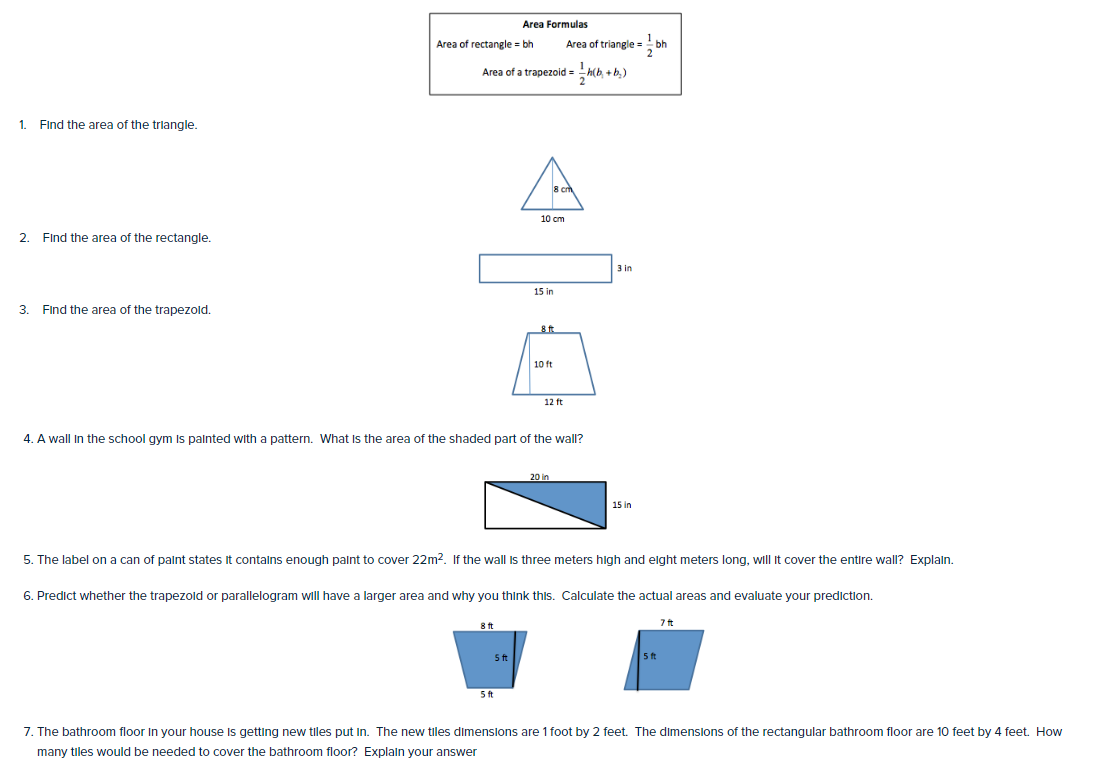
I was interested in creating a similar activity as pictured below along with a sample code that students would be able to input to enhance the lesson activity and teachers can easily refer to? Can someone offer an example of what the activity could look like along with a sample code?
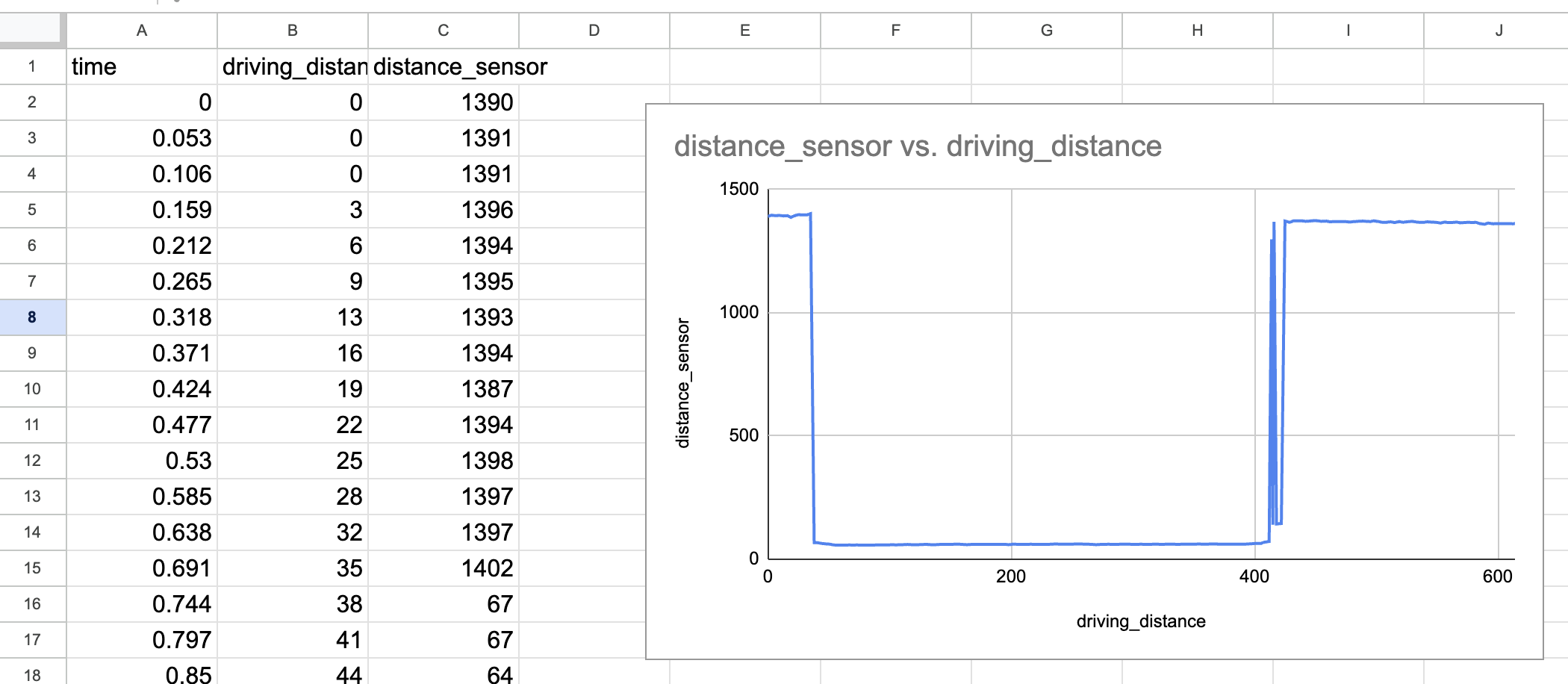
Here is an idea. You could mount the distance sensor on the side of the robot (see picture below). Then let the robot to drive through the 3D object. So the robot can log on the seconds and the distance it “sees” the object (code attached here motors and distance sensor to measure (1).iqpython (4.5 KB) ). Then the students can graph the data log as well as know the length of the side. (Full video attached below) For more details regarding the data logging, you could also take a read at our KB article.
Using the code Jimmy shared above, I think you could create those shapes out of various materials and then use the robot to measure the distances!
Then you could remake the questions in the example you shares as well. Like for number 4, have a rectangle on the floor labeled “School Gym” with the shaded area part of the question. Then students need to determine the length and width of the gym in order to complete that equation and find the area.
It gives them an extra challenge to determine those distances and then make the calculations themselves, while also incorporating some extra math concepts by using the data tables and graphing to determine that distance.
Hi @AlainaHaws and @Jimmy_Lin, I do apologize. The students do not use python coding yet. Are you able to provide the code in the block format? Thanks! I cannot wait to present this to the students and have them test the activity out!!
So I think we got a little over excited and weren’t super clear. For this, I would just give the students the code and have them download that specific project. This is a really good example of where text (python) coding is much simpler than a blocks project and would be difficult to recreate in blocks.
This project uses a microSD card to store the data being collected by the robot. In many of our resources, we have not showed off how that slot on the side of the IQ Brain can be used with the microSD card for data collection, so that’s a whole new implementation for many people.
What I envision for implementation is something like this:
Give the code to students and have them download the code to their robot. Alternatively, you could just have students bring their robot up to you and you download the code for them from your device.
Make sure students have their microSD card inserted into the robot.
Have students run the project with the Distance Sensor moving alongside the first side of the 3D shape as shown in the video above
Then they should stop the project and remove the microSD card
From here, you can walk them through opening the data on their computer with the connected microSD card and looking for the point when the Distance Sensor first “sees” the object in range and for the distance where it stops “seeing” the object. This is the data table and graph Jimmy shared above.
The difference in those numbers would then be the length of that side! Then they could put the microSD card back in the robot, run the same project again on the next side of the 3D object and repeat those same steps to find the length of the next side.
Thank you so much for the clarification/update. We currently do not have the micro sd cards for our IQ basebots. Do you have suggestion for an another activity using the block code?
We’ve been doing some testing and area is actually quite complicated when we try to do it with code. It’s been interesting to see how that plays out!
Here are two ideas for you:
Make a project that prints the answer to the problem and have the robot drive forward for one of the distances.
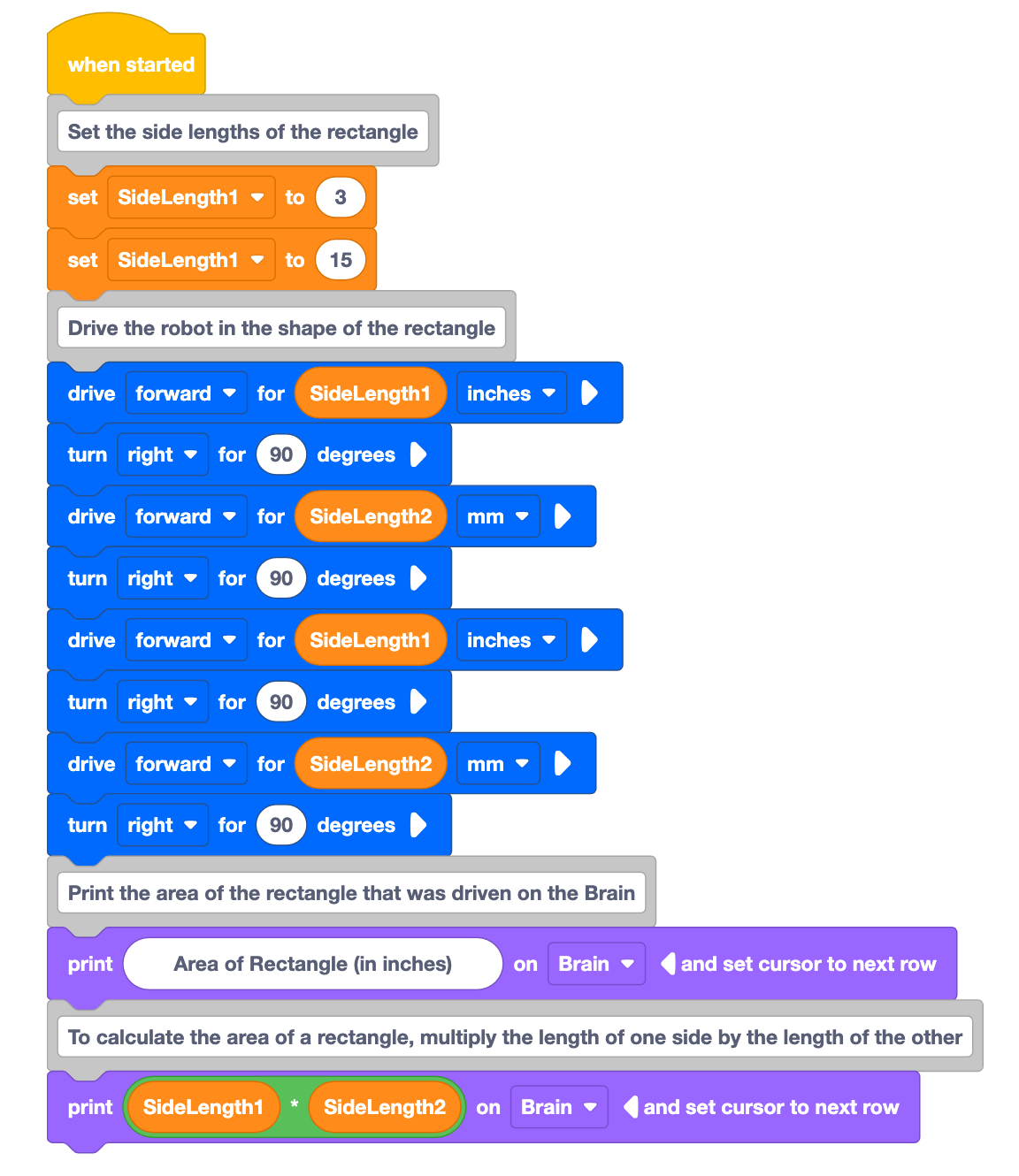
This project I have using variables so you could test it with multiple rectangles, but it could be done without them as well. In this project, the BaseBot drives in the shape of the rectangle defined in your example problem number 2, then calculates the area of the rectangle and prints it. You could have students build projects using the Operator blocks (the green ones) to show they know what the formulas for area is. And then they can have the robot also drive in that shape.
Use the Distance Sensor to detect the length of a side.
This is a very simple application, but would help students understand how the Distance Sensor works. They can place the Distance Sensor connected to the Brain at the beginning of a shape, then put something at the end of the shape to mark the distance. Then they can open the Devices Screen on the Brain and see the reported distance from the front of the object to the obstacle. In the image here (it’s hard to see the screen), the Distance Sensor is showing that it is 386mm from one edge of the IQ Kit to the book at the other edge.
Here is an article outlining how to use the Devices Screen: https://kb.vex.com/hc/en-us/articles/4407061189908-Using-the-Devices-Screen-IQ-Brain-2nd-gen
Given coordinates for the vertices of a polygon in the plane, use the coordinates to find side lengths and area of the polygon (limited to triangles and special quadrilaterals).
Once the students are able to trace the shape, they can sum it up to get the length of the polygon. Then if it is triangle or special quadrilaterals, they can calculate the area use the similar code like Alaina posted earlier.
Option 2
If you want to use coordinates, you could also use the art canvas playground to ask students to draw out the shape first. (They would need to calculate the angle for the shape.) This could also transfer to the real IQ. However, you will probably want to include a Pen attachment on your IQ robot to draw on the paper.
If you have shape that one of the vertices is (0,0), then the students can use the next coordinate to calculate the angle, then let the robot to turn to that angle and drive the length. So they will be able to trace / draw the shape with the robot.
Thank you! For irregular/compound polygons, do you have suggestions/recommendation for activities/block code for:
Determine the area of irregular or compound polygons. Example: Find the area of a room in the shape of an irregular polygon by composing and/or decomposing.
Thank you so much for your input so far!! Have a good weekend.
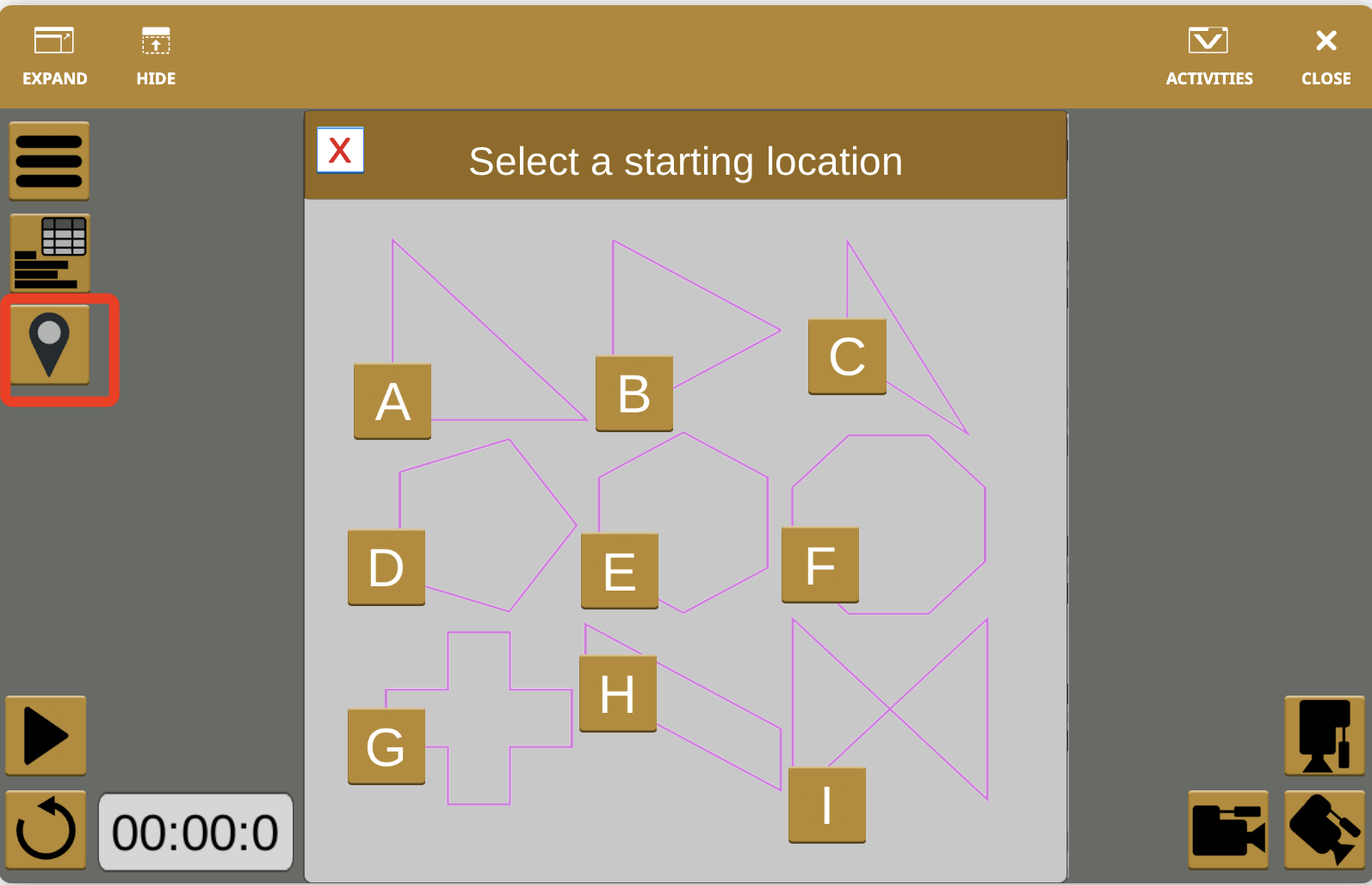
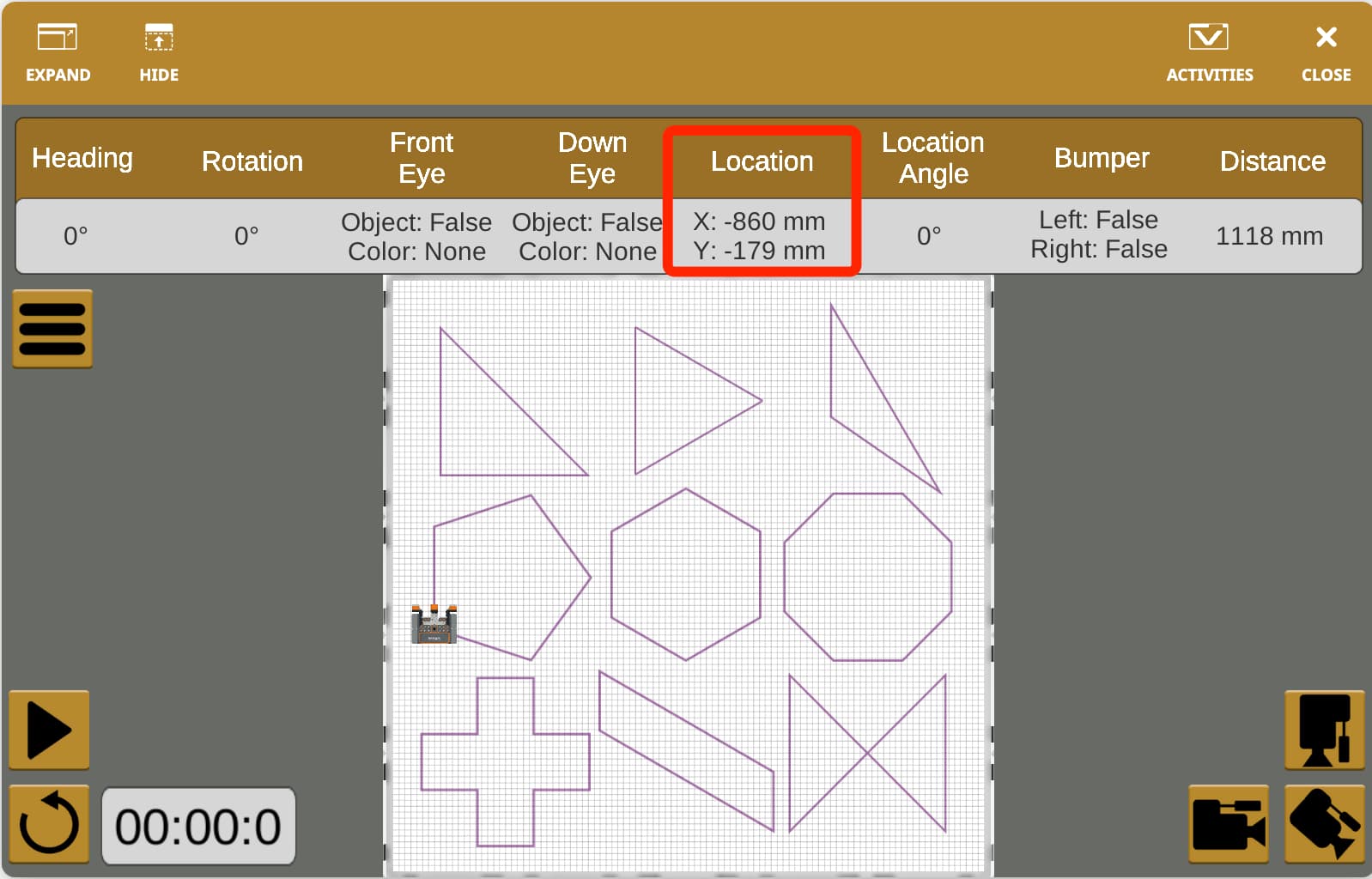
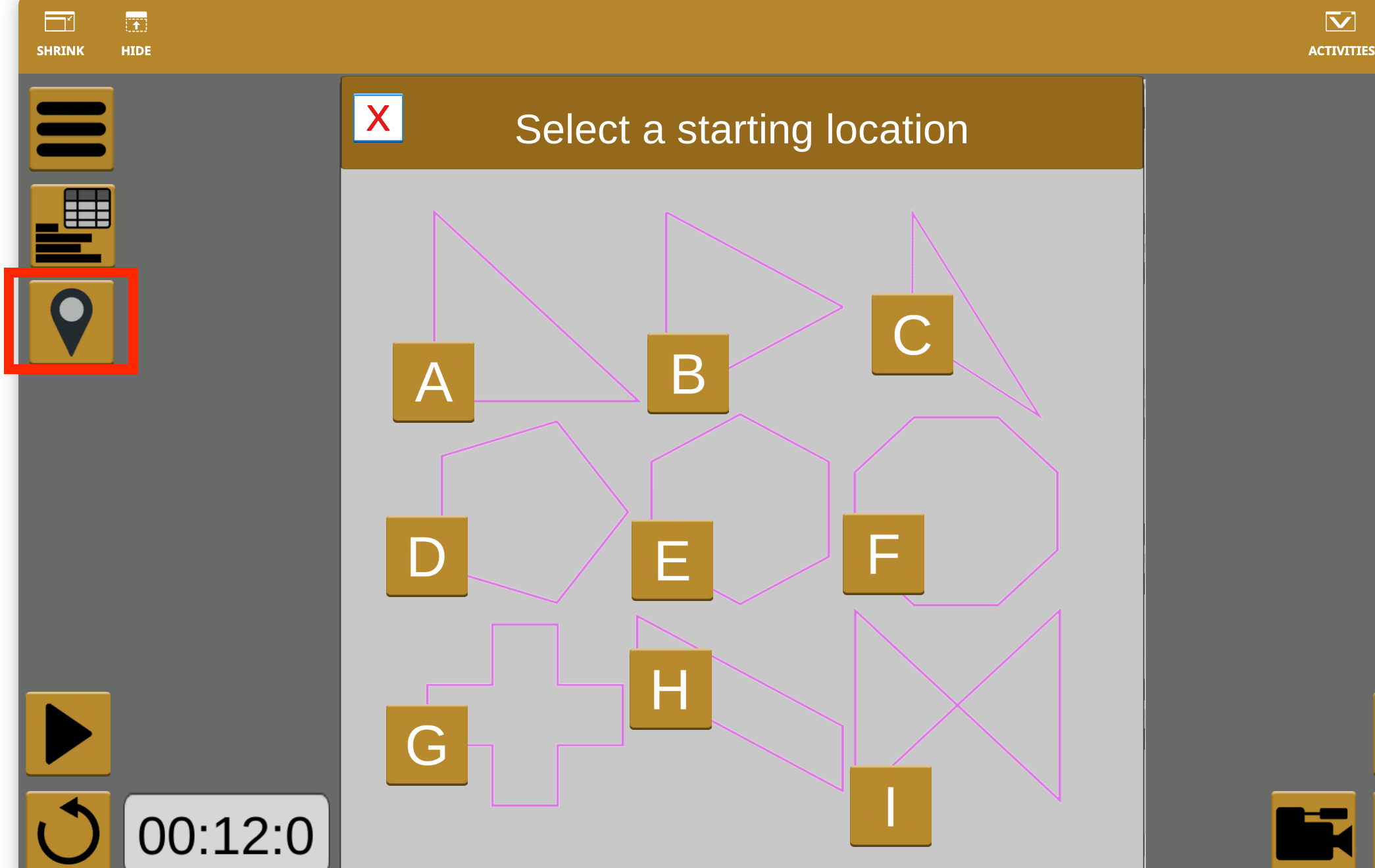
I think the Shape Tracer Playground in VEXcode VR would also work well here! The shapes at the bottom of the playground are those more irregular polygons that can be decomposed and then the area determined that way.
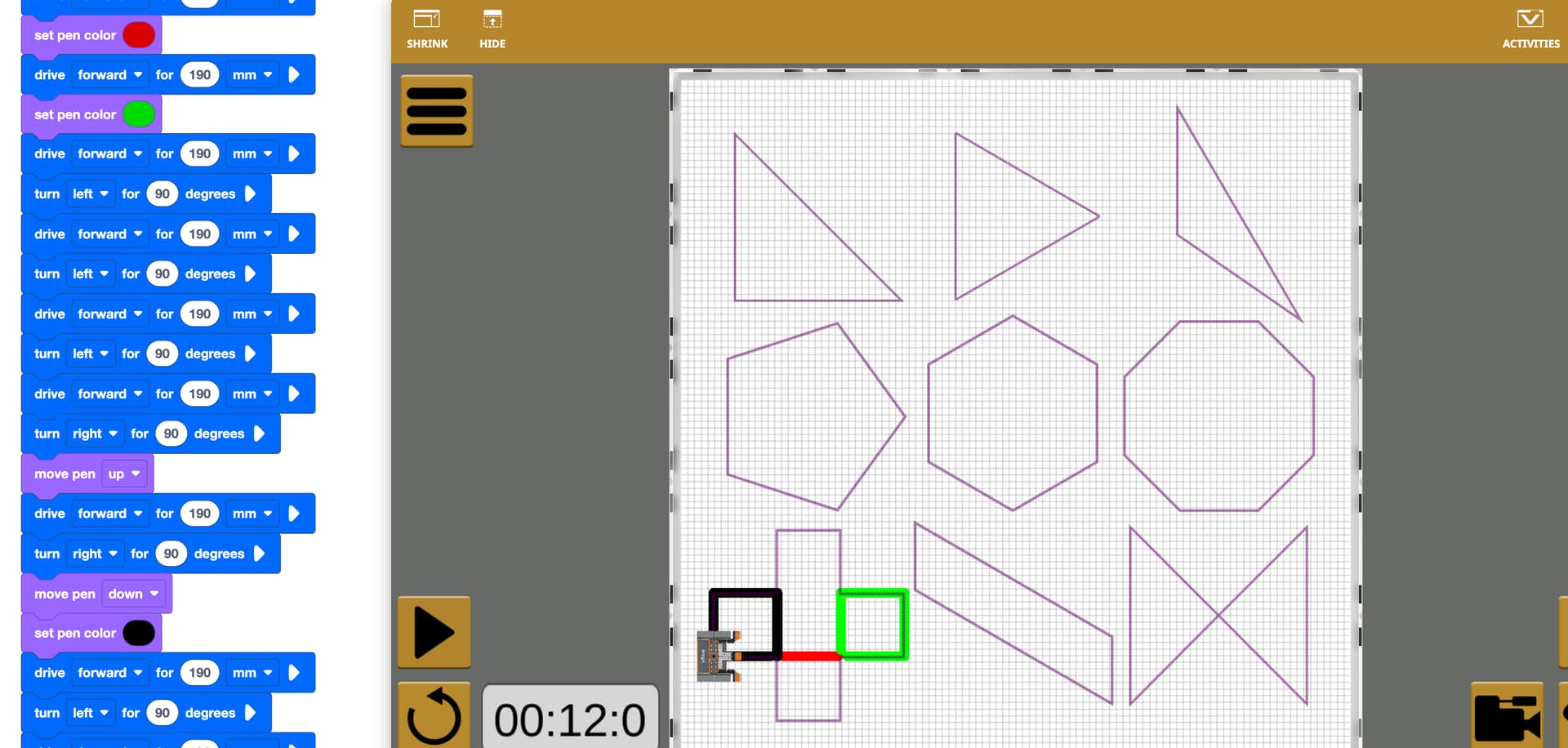
Here, I set the shape to G using the options in the menu on the left, then started to break down the shape into 5 squares. It took a little trial and error to determine the length of each side, but I was able to determine each of those 5 squares have a side length of approximately 190mm.
You could have students break down these shapes at the bottom and use the values determined from their code in order to solve for the area! This same type of exploration could be continued in person with the teacher drawing shapes on the VEX IQ tiles (wet erase works really well on tiles!). Then having students figure out how to break down the shape and calculate the area of each section of that irregular polygon using the values from their VEXcode projects.
I think you can do the number grid playground on VEX VR as a number line. Then you can let the robot to make a drawing of the number line or even fill in the color for the number line. However, this is limited to 1-10 which is not that ideal.
Another one you can do is to upload a real number line to art canvas + and ask students to draw the ticks on it. Remember the art canvas + playground starts at (0,0) which is the center of the playground.
I will let @AlainaHaws to share more about the histogram idea.
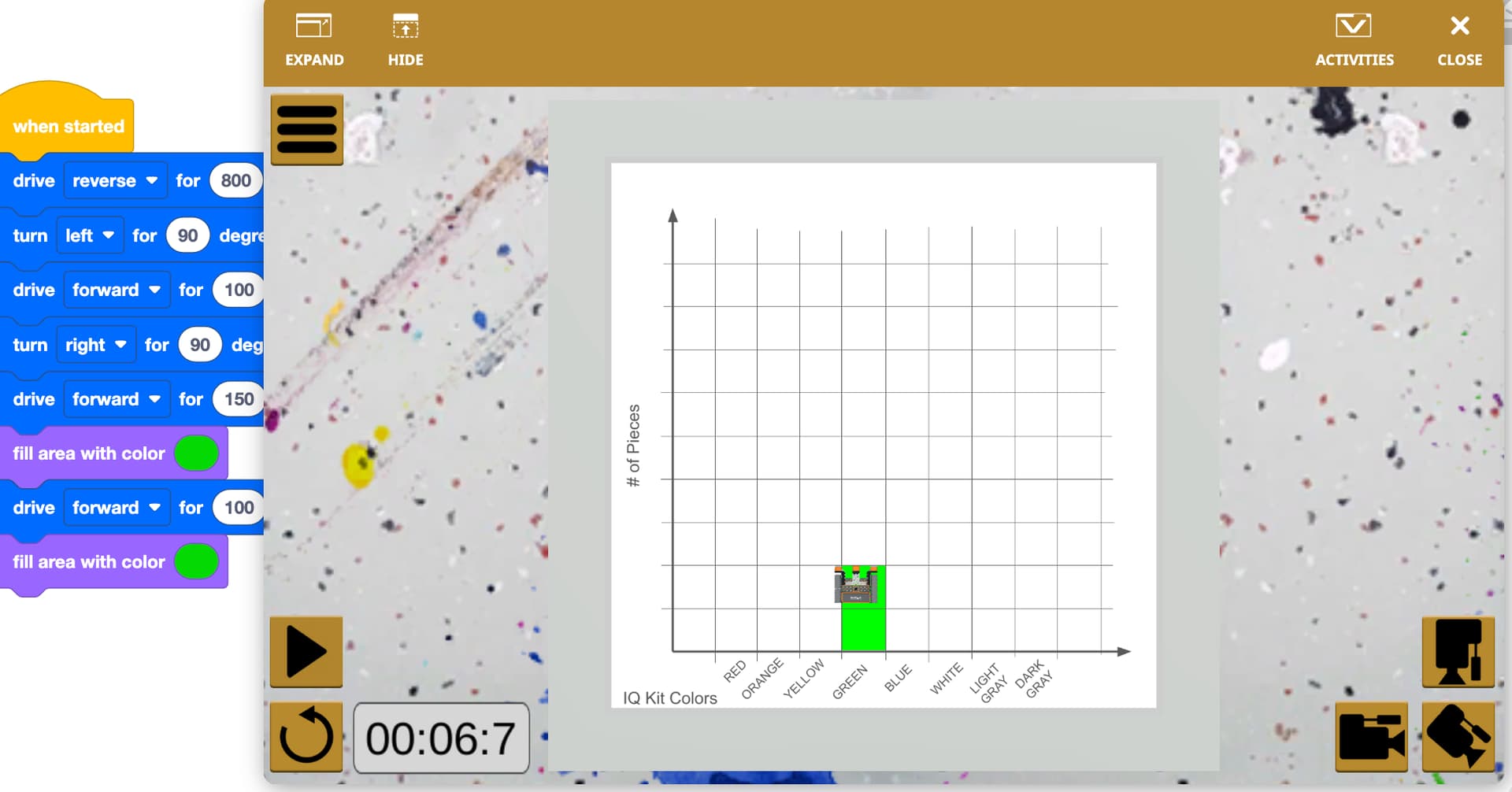
For the histogram, you could either provide students with a set of numerical data or have them collect that data themselves. Then create their histogram in VEXcode VR using Art Canvas+!
They would need to make their own graph outlines to upload to the canvas (instructions on how to do that are here). Then they can drive the robot and have it fill in the areas of the canvas with color in order to create their graph.
Here is a very rough mockup I made just to have a visual example as well. Notice it would need better labels on the Y-axis. But this would be a cool way for students to create those different types of graph options.
Wanted to circle back to this request! Thanks for your patience.
I was thinking you might be able to do something where students complete an obstacle course or maze with their robot (like in this VEX IQ Activity), but also have students time themselves for how long it takes to drive through the maze. They could compare data across the class and calculate the mean, median, and range of the time taken to complete the course.